
Application Field: ADAS and Autonomous Driving13 Ianuarie 2021
Ora: 11:00 (Romania)
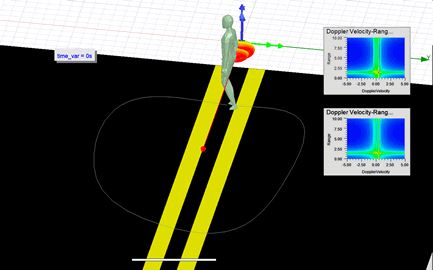
Multiple input, multiple output (MIMO) radar enables “4D imaging” for driver-assistance and automated driving systems. Angular position and range can be determined using triangulation and propagation delay from the sensor to the target. The fourth dimension is the target trajectory (i.e., velocity) which can be extracted from the Doppler frequency shift. Additional information resulting from relative motion within the moving target coordinate system can also be determined. For example, the vibrating mudflaps on a truck, the periodic leg motion of a person riding a bicycle and the rotation of wheels on a vehicle all exhibit characteristic “micro-Doppler” signatures.
This webinar will describe the application of HFSS SBR+ to accurately model the physical interaction of radar with dynamic objects to predict radar performance and capture the micro-Doppler effect. We will describe how to create and modify dynamic objects exhibiting motion within the local frame of reference and provide an outlook on the application of machine learning for target classification.